A Brief/Incomplete Overview of Snake-Like Robotics
An Overview of Snake-Like Robotics
True lateral undulation through uneven terrain is an ability of all snakes, regardless of size or shape. The properties of snakes that allow this to occur are the constant surface of the snake and its variably frictional surface, a nervous system that can sense objects touching its body, and a high degree of freedom. The following robotics researchers have attempted to create snake robots that can mimic snakes in their simulated and real environments.
Hirose
Hirose has spent almost 4 decades developing snake-like robotic mechanisms. The latest work is detailed in [Snakes and Strings 2004], while his most comprehensive work is detailed in [Biologically Inspired Robots 1993]. His research has resulted in the following three snake-like mobile robots: ACM-R3, Helix-I, and Souryu.
The ACM-R3 robot is a robotic mechanism with interlinking vertebrae. Each link has a one-DOF prismatic joint, and they are arranged such that the axis of rotation of one vertebra along the length of the robot is perpendicular to the next axis of rotation of the next. The ACM-R3 can be seen in figure 1. Contact between the ACM-R3 and the ground is provided via passive wheels. It is capable of multiple types of locomotion that, owing to its passive wheel configuration, work very capably on flat surfaces.
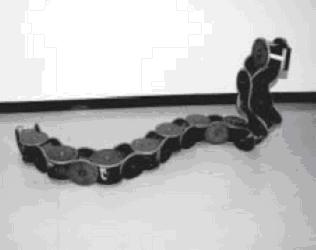
Figure 1
The HELIX-I robot is a snake-like mobile robot that can locomote in water. Its locomotion is based on the propulsion mechanism of the Spriochete microorganism wherein the interconnected vertebrae, connected via actuated universal joints are twisted in such a manner as to move the robot in a desired direction. Helix-I can be seen in Fig. 2.
The Souryu vehicle is a three-body mobile chained robot. Each outer body is connected to the inner body via a 2-DOF prismatic joint that can change the pitch and yaw of the bodies with respect to each other. Two actuated tracks are attached to each body, as shown in Fig. 3. These tracks rotate about a pitch axis that runs transversely through each body. This snake is similar to others devised partially by Hirose, each using active wheels or tracks for locomotion. These are not under consideration as true snake robots use body kinematics as opposed to actuated wheels or tracks.
All the true snake robots were modeled after an intensive study of their biological counterparts. Hirose attempted to model snake-like undulation by deriving force and power functions with respect to distance and torque along the body of the snake. The following equations were the result of that modeling.

These equations describe the curve of the robot at some point s along the body of the snake. This novel curve was termed the serpenoid curve, and fit closely with the curves made by snakes during gliding lateral undulation, where the friction constants along the surface are relatively constant (i.e. a continuously smooth floor).

Figure 2

Figure 3
Tacile sensors were integrated into his ACM series robots through simple binary contact switches. Lateral inhibition type control was used to navigate the robots through tight corridors (Fig. 4). The principle behind this type of control is that when pressure is applied to the robot at a certain point, the rest of the robot will adjust to minimize this pressure. The three steps to lateral inhibition are shown in Fig. 5. In Fig. 5(a), the robot senses a force applied to an arbitrary point along its longitudinal axis. In Fig. 5(b), the robot attempts to minimize this force by changing its body position. Finally, in Fig. 5(c), the robot adjusts its posture to restore its original body shape.
When applied to Hirose’s ACMs, the robots could accomplish the motion found in Fig. 4 because they relied on passive wheels as a contact surface and didn’t apply force to their surroundings.
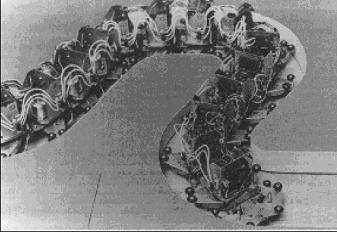
Figure 4

Figure 5
Chirikjian and Burdick
Chirikjian and Burdick have developed a method for kinematic planning through obstacles in a 3D environment using a hyper-redundant mechanism. The mechanism used for their experiments was a Variable Geometry Truss (VGT) hyper redundant robot.
To achieve their kinematic planning, they would take an arbitrary environment, and attempt to fit a curve within it using what they described as a ‘modal’ or ‘modular’ approach. This is important to snake locomotion as it describes the path through which a snake-like robot could traverse to overcome the obstacles in its environment. However, the robots developed by Chirikjian and Burdick were mostly fixed (i.e. non-mobile). Their work in mobile robots consisted of snake-like locomotion similar to that of concertina as well as caterpillar-like motion.
Conradt and Varshavskaya
Conradt and Varshavskaya have developed a snake-like robot modeled on a lamprey’s central nervous system. The robot consists of a planar robotic chain, where each link is connected to the next via a 1-DOF prismatic joint (Fig. 6). Each joint is programmed to rotate at a sinusoidal frequency, with joint rotation being offset by some experimentally determined amount.

Figure 6
This experimentally offset amount, along with the rotational velocity, provides the robot with the ability to move over a constant smooth surface via a method similar to the side slipping undulation found in biological snakes when traversing similar terrain.
This snake, however, relies on an open looped controller, as there are no sensing mechanisms to provide feedback as to the state of the robot within an uneven terrain.
Summary
The robots summarized above represent the state of the art in snake-like robots with the potential for true lateral undulation. Each robot possesses a high degree of freedom when configured with enough links. Unfortunately, none of them have integrated the proper mechanisms for true lateral undulation, namely a uniform robotic skin and force sensitive devices embedded into it.
True lateral undulation through uneven terrain is an ability of all snakes, regardless of size or shape. The properties of snakes that allow this to occur are the constant surface of the snake and its variably frictional surface, a nervous system that can sense objects touching its body, and a high degree of freedom. The following robotics researchers have attempted to create snake robots that can mimic snakes in their simulated and real environments.
Hirose
Hirose has spent almost 4 decades developing snake-like robotic mechanisms. The latest work is detailed in [Snakes and Strings 2004], while his most comprehensive work is detailed in [Biologically Inspired Robots 1993]. His research has resulted in the following three snake-like mobile robots: ACM-R3, Helix-I, and Souryu.
The ACM-R3 robot is a robotic mechanism with interlinking vertebrae. Each link has a one-DOF prismatic joint, and they are arranged such that the axis of rotation of one vertebra along the length of the robot is perpendicular to the next axis of rotation of the next. The ACM-R3 can be seen in figure 1. Contact between the ACM-R3 and the ground is provided via passive wheels. It is capable of multiple types of locomotion that, owing to its passive wheel configuration, work very capably on flat surfaces.

Figure 1
The HELIX-I robot is a snake-like mobile robot that can locomote in water. Its locomotion is based on the propulsion mechanism of the Spriochete microorganism wherein the interconnected vertebrae, connected via actuated universal joints are twisted in such a manner as to move the robot in a desired direction. Helix-I can be seen in Fig. 2.
The Souryu vehicle is a three-body mobile chained robot. Each outer body is connected to the inner body via a 2-DOF prismatic joint that can change the pitch and yaw of the bodies with respect to each other. Two actuated tracks are attached to each body, as shown in Fig. 3. These tracks rotate about a pitch axis that runs transversely through each body. This snake is similar to others devised partially by Hirose, each using active wheels or tracks for locomotion. These are not under consideration as true snake robots use body kinematics as opposed to actuated wheels or tracks.
All the true snake robots were modeled after an intensive study of their biological counterparts. Hirose attempted to model snake-like undulation by deriving force and power functions with respect to distance and torque along the body of the snake. The following equations were the result of that modeling.
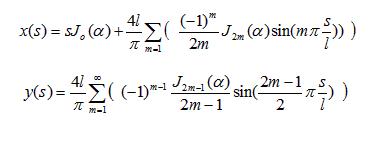
These equations describe the curve of the robot at some point s along the body of the snake. This novel curve was termed the serpenoid curve, and fit closely with the curves made by snakes during gliding lateral undulation, where the friction constants along the surface are relatively constant (i.e. a continuously smooth floor).

Figure 2

Figure 3
Tacile sensors were integrated into his ACM series robots through simple binary contact switches. Lateral inhibition type control was used to navigate the robots through tight corridors (Fig. 4). The principle behind this type of control is that when pressure is applied to the robot at a certain point, the rest of the robot will adjust to minimize this pressure. The three steps to lateral inhibition are shown in Fig. 5. In Fig. 5(a), the robot senses a force applied to an arbitrary point along its longitudinal axis. In Fig. 5(b), the robot attempts to minimize this force by changing its body position. Finally, in Fig. 5(c), the robot adjusts its posture to restore its original body shape.
When applied to Hirose’s ACMs, the robots could accomplish the motion found in Fig. 4 because they relied on passive wheels as a contact surface and didn’t apply force to their surroundings.

Figure 4

Figure 5
Chirikjian and Burdick
Chirikjian and Burdick have developed a method for kinematic planning through obstacles in a 3D environment using a hyper-redundant mechanism. The mechanism used for their experiments was a Variable Geometry Truss (VGT) hyper redundant robot.
To achieve their kinematic planning, they would take an arbitrary environment, and attempt to fit a curve within it using what they described as a ‘modal’ or ‘modular’ approach. This is important to snake locomotion as it describes the path through which a snake-like robot could traverse to overcome the obstacles in its environment. However, the robots developed by Chirikjian and Burdick were mostly fixed (i.e. non-mobile). Their work in mobile robots consisted of snake-like locomotion similar to that of concertina as well as caterpillar-like motion.
Conradt and Varshavskaya
Conradt and Varshavskaya have developed a snake-like robot modeled on a lamprey’s central nervous system. The robot consists of a planar robotic chain, where each link is connected to the next via a 1-DOF prismatic joint (Fig. 6). Each joint is programmed to rotate at a sinusoidal frequency, with joint rotation being offset by some experimentally determined amount.

Figure 6
This experimentally offset amount, along with the rotational velocity, provides the robot with the ability to move over a constant smooth surface via a method similar to the side slipping undulation found in biological snakes when traversing similar terrain.
This snake, however, relies on an open looped controller, as there are no sensing mechanisms to provide feedback as to the state of the robot within an uneven terrain.
Summary
The robots summarized above represent the state of the art in snake-like robots with the potential for true lateral undulation. Each robot possesses a high degree of freedom when configured with enough links. Unfortunately, none of them have integrated the proper mechanisms for true lateral undulation, namely a uniform robotic skin and force sensitive devices embedded into it.
posted by Unknown at 10:43 AM
0 comments
![]()






